Our Past Robots
SAM
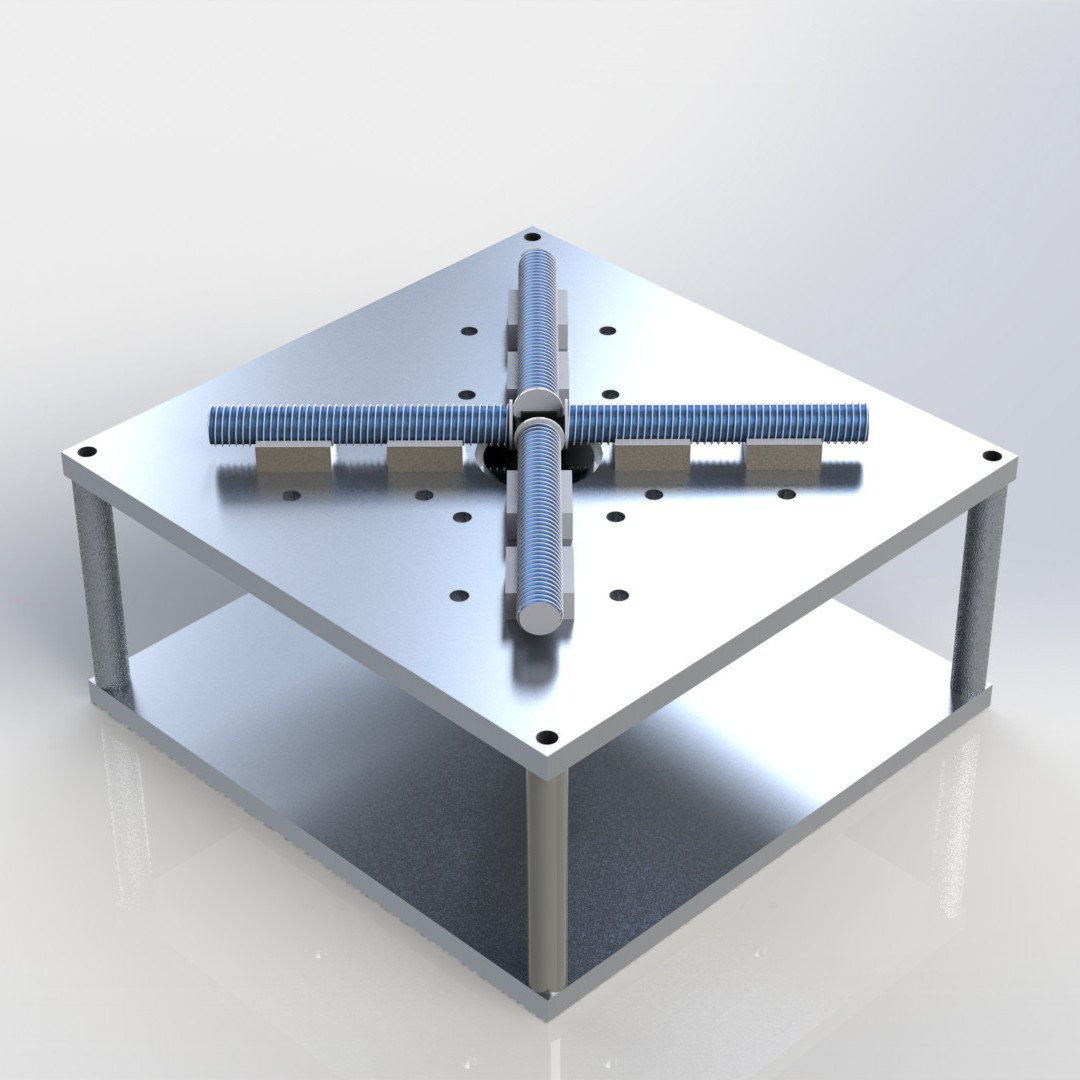
The Solenoid Actuated Micro-robot (SAM) is our primary competition robot for ICRA’s micro-robotics challenges. A small particle on a silicon wafer is controlled by 5 solenoids which pull on the particle allowing short discrete “steps” of movement. By pulsing these solenoids quickly, the particle can be moved quickly and precisely allowing the robot to follow a path specified in the competition. The robot itself is composed of a small magnetic particle. The control mechanism is comprised of a stage in which two solenoids are placed in the x-axis, two solenoids in the y-axis and one solenoid is placed in the z-axis, below the silicon wafer. All the solenoids are pointed towards the silicon wafer and pull the particle when they receive a signal. The solenoids in the x and y axis allow for lateral movement while the solenoid below acts as a braking mechanism, increasing friction when pulsed. This allows for discrete steps to be made in a quick and precise manner.
ELLA
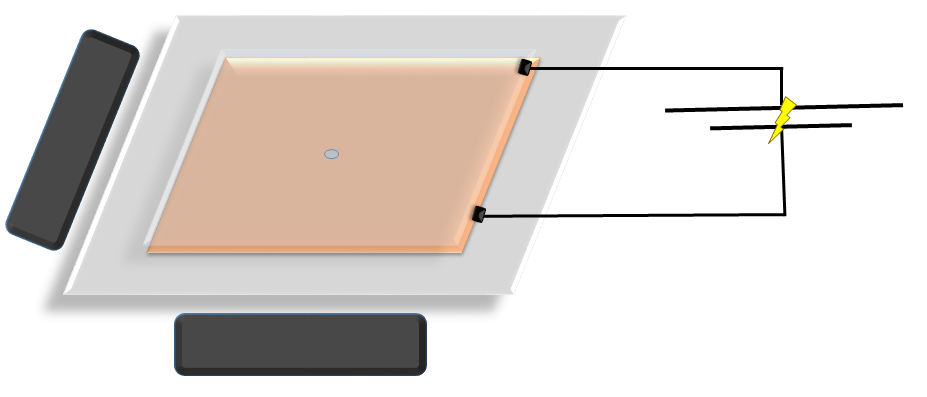
ELLA, which stands for ELectrowetted Liquid Actuation, features a control grid of capacitors and a polarizeable nanolitre droplet. The capacitor array, controlled by a multiplexor voltage source, maneuvers the droplet via electrowetting. The voltage source induces a potential difference on any desired target plate adjacent to the droplet, polarizing it and drawing it onto the plate. Extremely fine control can also be achieved using simultaneous charges on adjacent plates. In this way, the nanolitre droplet can move freely about the capacitor array using any given path.
SAW
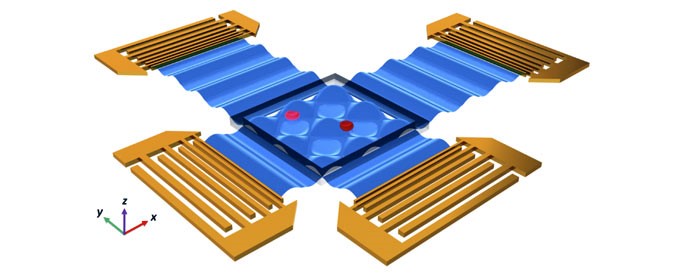
The Surface Acoustic Wave (SAW) Team aims to diversity UW_NRG’s arsenal of robots by developing a microrobot actuated by surface acoustic waves. Essentially, a fluid droplet - the robot - will be placed atop a hydrophobic silanized glass superstrate. The glass substrate is then placed atop a lithium niobate wafer, chosen for its piezoelectric properties, that is patterned with four interdigitated transducers that convert electrical signals into mechanical waves. By regulating the electrical signals, the oscillations propagating along the wafer’s surface can be controlled, thus allowing for precise manipulation of the fluid droplet in the x-y plane."
MAYA

The Micro-Assembly YBCO Apparatus is a UW_NRG project aimed at completing ICRA’s micro-assembly challenge. The robot is to be made out of YBCO, a material that becomes a superconductor at liquid nitrogen temperatures, which has been pressed into a desired shape with microfabricated molds. The robot is actuated by flux pinning, a phenomenon where the superconductor that makes up the robot resists changes to the magnetic field passing through it. This allows control of the robot through the magnetic field in three dimensions, as well as rotation, enabling the robot to complete the assembly challenge more easily than robots confined to the playing field surface.